Permet de concevoir des visuels et des activités de codage/décodage de déplacements pour le robot Bluebot
 Une application réalisée par Frédéric Misery, ERUN
Une application réalisée par Frédéric Misery, ERUN
Comment cela fonctionne ?
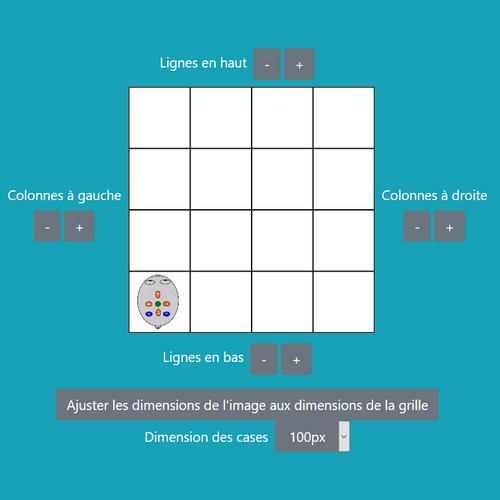
- On paramètre d’abord les dimensions de la grille en choisissant le nombre de lignes et le nombre de colonnes.
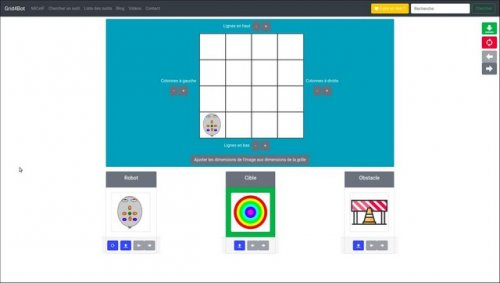
- On charge éventuellement ses propres images pour le robot, la ou les cibles, le ou les obstacles.
- On oriente le robot.
- On clique sur l’élément à positionner (contour vert) et on clique sur les cases de la grille dans lesquelles on veut placer celui-ci.
- Une fois terminé, il ne reste plus qu’à télécharger l’image. Celle-ci trouvera alors sa place dans un carnet de programmation ou dans la bibliothèque de grilles de l’application Blue-Bot sur tablette.
Accéder : cliquer ici